
Včera dorazili unašeče kol pro přidělání k motorům.

Unašeče jsou s 12mm šestihranem, 6mm dírou pro hřídel a M4 závitem pro přišroubování kola.

Pasují akorát 🙂
Při čekání na zásilku jsem si ujasnil koncepci celého robota a nejvíc se mi zamlouvá 4 kolový model který používá RoverOva z Katedry robotiky VŠB-TU Ostrava.
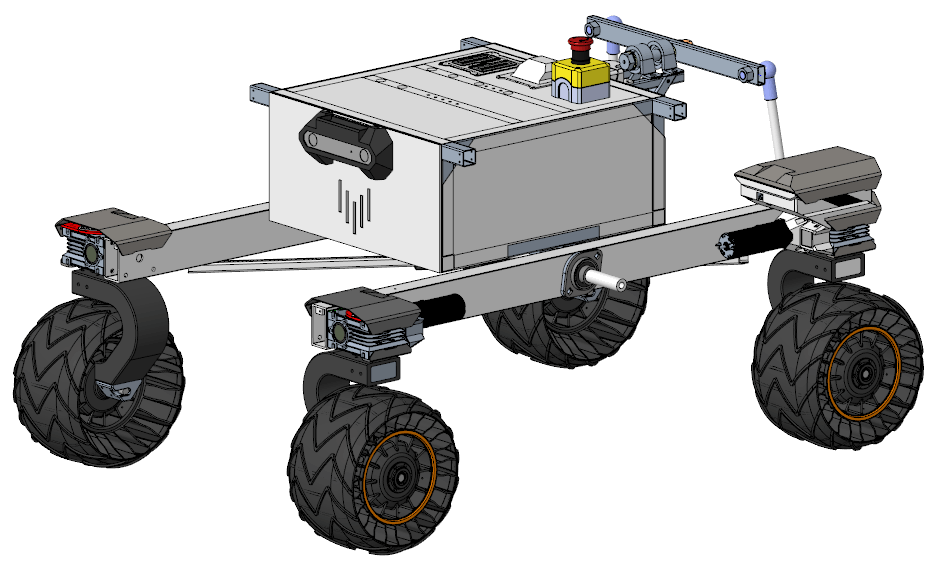
Podvozek mého NEDbota bude podobný akorát bez natáčení jednotlivých kol. Už se mi začínají hromadit hliníkové profily na zavěšení kol.
Kdyby si potřeboval něco vytisknout na 3D tiskárně, tak dej vědět 😉
Dikes, budu na to myslet😉